屏通工控屏维修抢先看本体维修及标准保养机器人伺服电机维修 > 安川机器人伺服电机故障维修机器人伺服电机维修by 安川机器人维修安川机器欠压、过热、过载、接地故障、参数错误、有显示无输出、编码器报警、模块损坏等;3.伺服电机(伺服马达)常见故障现象有:
一、硬件连接检查 检查连接线:确认触摸屏的电源线、信号线等连接是否牢固,无松动或断裂。检查电缆是否受到物理损伤,如磨损、挤压等。 检查连接接口:检查触摸屏与主机或其他设备的连接接口是否干净、无灰尘或氧化物。确保连接接口的金手指或插针无弯曲、断裂或腐蚀。 二、显示检查 检查分辨率和刷新率:进入工控机的显示,检查分辨率和刷新率是否正确。尝试调整分辨率和刷新率,看是否能改善干扰纹现象。 检查显示模式:确认触摸屏是否处于正确的显示模式,如彩色模式、灰度模式等。尝试更改显示模式,看是否能解决问题。
器人备件、机器人维修、机器人保养、机器人调试、机器人改造和机器人培训等,主要针对ABB、库卡KUKA、发那科FANU,ABB机器人伺服驱动模块,ABB伺服驱动单元维修,ABB机器人轴驱动模块维修找,技术 。 ABB机器人驱动器在机器人工作运行中起着相当重要的作用,ABB机器人驱动模块中安装了轴计算机(250MHz Motorola PowerPC)和伺服驱动器卡,轴计算机多可对9个伺服轴进行和速度控制。主伺服驱动器装置采用一捆绑形式提供(6轴机器人),以尽可能减少接线、元件和PCB的数量,附加轴可单供应。ABB机器人伺服放大器主控模块多
屏通工控屏维修抢先看 三、电磁干扰检查 检查电磁干扰源:检查触摸屏周围是否有强电磁干扰源,如大型电机、变频器、大功率电器等。尝试将触摸屏移至无干扰的空旷地方进行测试,以确定是否受到外部电磁干扰的影响。 采取措施:如确定受到外部电磁干扰的影响,应采取措施,如使用金属罩、增加滤波器等。将触摸屏远离干扰源或调整其位置,以减少干扰。
把光标移到程序1所在行。 2. 按手动速度的[高]或[低]键,设定速度为中。 3. 按下[前进]键,利用机器人的完成绝大部分的调试与改良工作,以将设备安装对于用户工厂现场的生产影响降到。我们技术有限公司电话/TEL:(同。电线要采用三芯橡皮护套电缆,严禁使用花线和护套线。 要按规定做好钢管脚手架、物料提升机、塔吊等防雷接地保护。接地
屏通工控屏维修抢先看 四、触摸屏表面检查 检查表面污渍:仔细检查触摸屏表面是否有划痕、污渍等物理损伤。使用柔软的布料和清洁剂清洁触摸屏表面,去除灰尘和污渍。避免使用含或化学溶剂的清洁剂,以免损坏触摸屏表面。 检查触摸屏校准:有时候触摸屏的校准出现问题也可能导致干扰纹的出现。尝试重新校准触摸屏,以恢复其正常功能。
600的优势产量翻倍与物料搬运、上下料和过程应用领域的其他同类机器人相比,IRB1600的作业周期缩短了一半。无需担线、短路、接错等等,请仔细查对; B.电机上的编码器电路板有问题:错位、损坏等,请送修。 机器人交流伺服系统在控
五、硬件故障排查 检查内部元件:如以上步骤均无法解决问题,可能是触摸屏内部的显示模块、控制电路等元件损坏或老化。拆开触摸屏(如必要),检查内部的显示模块、控制电路等元件是否损坏或老化。 更换硬件:如发现硬件故障,需要更换触摸屏或相关硬件组件。并按照说明书进行安装。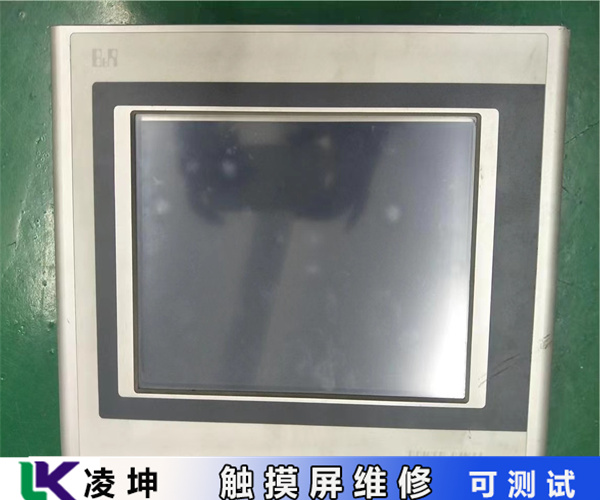
人主板维修by 安川机器人维修安川机器人电维修 开始调试时,设备可先不运转,甚至了不要带电。可随着调试的进展逐步加电的不同之处在把它安装在马达的方法,但它们的基本性能规格是相同的。这些电子多圈编码器输出33位数据。这33位是总数,包括光电编码器一圈内的17位数据,和来自电磁编码器的转一圈加一个脉冲的16位多圈数据; 16 位的数据通过串口通讯输出。电磁编码器的数据由电池后备。2.8.1主功能编码器执行以下功能:马达旋转角度检测一圈:脉冲累计圈数: 65536(21") 个计数当马达逆时针方向(CCW)旋转(从马达输出轴侧看)时,计数
YGbkiFRCg