denso机器人伺服驱动器维修好处理 再次运行时机器人将从主程序重新执行,需要重新输入已经码放的包数信息,十注意事项1.送电定要确保电源接线正确,牢靠,并且有效接地2.示教器要断电插拔3.断电后再重启,一定要等待完全关机后约1分钟再启动。
当你的机器人出现短路、无法开机、LED全亮、报警、上电无反应、无通讯、上电不动作、过热、冒烟、无法启动、内部错误、LED2红灯亮、竖线、花屏、黑屏、按键不良、白屏、闪屏、启动报警、温度高等故障维修可以及时联系昆泰自动化。 工业机器人备件售后服务:产品提供24小时在线技术服务,产品质保期12个月,免费提供产品升级优势提供ABB,KUKA,Yaskawa安川,FANUC发那科,Kawasaki川崎,Panasonic松下,COMAU柯马。主要针对ABB、库卡KUKA、发那科FANUC、安川、川崎、史陶比尔、OTC、那智越等品牌。我公司对工业机器人示教器,触摸屏的无法触摸、触摸不灵、触摸不准、触摸偏移、黑屏、屏不亮、白屏、不显示、报警故障、通讯错误、无法通讯、无法连接、蓝屏、花屏、屏上出现条纹等维修,检测,上门维修。有测试台,测试好交货看公司维修实例,请下拉常见维修产品及故障现象:1.触摸屏、人机界面、控制面板常见故障现象有:通电不显示、触摸屏不灵、触摸后鼠标跑偏、面板按键无反应、触摸表面碎裂、花屏、白屏、闪屏及程序等故障维修;2.伺服驱动器常见故障现象有:驱动器报警、无显示、缺相、过流、过压、欠压、过热、过载、接地故障、参数错误、有显示无输出、编码器报警、模块损坏等;
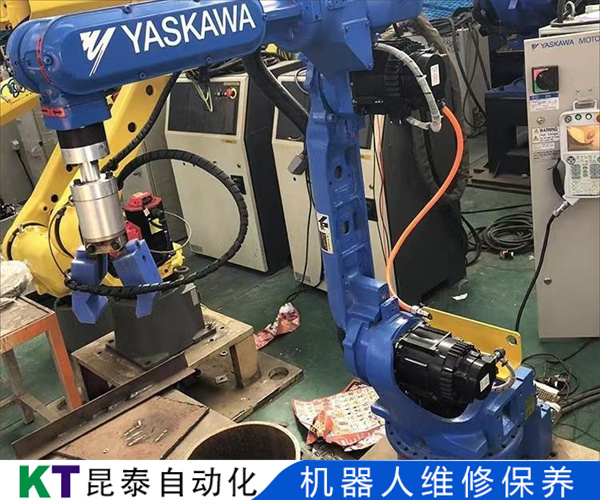
确认电机运行转态故障确认,电机拆除新电机更换电机更换后,测试运行,齿轮箱密封齿轮箱注油自动运行,漏油状态确认ABB机器人电机故障维修服务过程:故障问询与现场工程师沟通,确认故障问题为四轴传动问题,开机上电。

现货备品下单后即可安排出货,特殊备品需要预定的话,业务员确定货期。Q你们是在哪里?可以上门考察吗?我们位于广州天河区,交通便利,欢迎上门莅临考察。:广科智能,出处!Tags:洁净机器人KUKA多功能卡MFC+DSE卡|广州市广科智能技术有限公司是工业机器人服务商,提供机器人维修、机器人保养、工控设备维修以及机器人产品与备件的销售等服务,涉及的品牌有:ABB、KUKA、安川、FANUC、Kawasaki川崎、Panasonic松下、COMAU柯马、STAUBCI史陶比尔、三协等。从机器人选型、安装、调试、改造与无忧和维保为客户提供全方面服务,实现工业机器人一-站式服务商。产品参数品牌:库卡KUKA名称:多功能卡型/成色:全新/二手数量:长期备有现货价格:电议机器人备品服务优势:1.新品提供一年以上保修期。
denso机器人伺服驱动器维修好处理 1、停止运行:如果机器人出现过载故障,应立即停止其运行,以防止进一步的损坏或安全问题。 2、检查负载情况:检查机器人的负载的重量、位置和分布情况。确保负载没有超出机器人的设计和规格范围。 3、检查机械部件:仔细检查机器人的机械部件,如关节、齿轮、传动系统等。寻找损坏、磨损或松动的迹象。必要时,进行维修或更换损坏的部件。 根据客户需求调整,Panasonic松下MDDDT5540N02伺服驱动销售--李先生公司:://gkznjsPanasonic松下MDDDT5540N02伺服驱动销售找,我们基本上进口产品都能采购,只要您提供品牌和型号。 控制柜电池更换服务过程:将机器人进行备份并将摇至排油对机器人各关节进行排油并加油机器人本体电池跟换机器人控制柜电池进行更换,控制柜进行清理安川维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例安川维修案例安。
 4、检查控制系统:检查机器人的控制系统,包括传感器、编码器、驱动器和控制器。确保传感器和编码器的读数准确,驱动器输出稳定,控制器工作正常。修复或更换故障的控制系统元件。 5、检查机器人环境:检查和排除机器人工作环境中的异常情况。例如,清除阻塞物或障碍物,改善温度、湿度或振动条件等。 6、测试运行:在进行维修和调整后,进行运行测试以验证机器人是否正常工作。确保机器人的负载在正常工作范围内,没有发生过载故障。
4、检查控制系统:检查机器人的控制系统,包括传感器、编码器、驱动器和控制器。确保传感器和编码器的读数准确,驱动器输出稳定,控制器工作正常。修复或更换故障的控制系统元件。 5、检查机器人环境:检查和排除机器人工作环境中的异常情况。例如,清除阻塞物或障碍物,改善温度、湿度或振动条件等。 6、测试运行:在进行维修和调整后,进行运行测试以验证机器人是否正常工作。确保机器人的负载在正常工作范围内,没有发生过载故障。随着科技的发展,越来越多的各类机器人投入了使用.其中用于工业生产的工业机器人是庞大的一个分支,它们具有、加工质量稳定、环境适应性强等特点,在诸多工业领域扮演着越来越重要的角色.为促进我国的经济发展发挥了重要作用。但随着进口机器人使用量的增加,其维护问题就显得尤为重要。现阶段关于机器人维护方面还存在很多问题,如很多国外供应商服务不及时,备件价格昂贵且采购周期长,缺少必要的维修资料等等。定义安川MOTOMAN示教盒是一个用来注册和存储机械运动或处理记忆的设备,该设备是由电子系统或计算机系统执行的。适用于编程工业MOTOMAN机器人。操通过安川MOTOMAN示教盒进行手动示教,控制MOTOMAN机器人达到不同位姿。 检查程序有无偏差,慢速试运行程序,确定正常后,再生产现场清理清理好现场,提出合理建议,服务结束服务内容具体如下:报警故障代码备份系统放大器拆解更换新的放大器开机正常,运动外部轴程序校验,试生产川崎维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修。
模具,液压,电子,半导体,光学,传感器和测量技术及金属加工工业的发展,更多的数控加工设备投入到生产加工的行业中来,所以一场真正的工业现已到来,伺服维修,伺服驱动器维修具实力的维修站技术 直线:工控设备维修工控设备维修>横河伺服电机维修2产品编:Pro工控设备维修 |产品名称:横河伺服电。 E1087轴XX的终止点超出运动范围,E1088目标超出运动范围,E1089在状态下不能执行直线运动,E1090外部调节数据未输入,E1091外部调节数据异常,E1092调节数据超出限值,E1093执行调节动作的运行指令不正确。
另外紧急客户可以提供KUKA机器人伺服组件KSP相应同型号的备件供客户使用,避免因机器人损坏而造成停产:出仓维修件KUKA机器人KUKA安全逻辑电路板都经过检测,有安装到我方机器人上测试,确实送到客户方能正常使用,避免无法测试返修给客户带来设备测试风险和停机损失。保修承诺:对维修的KUKA机器人安全逻辑电路板产品,公司提供数月的保修服务。库卡安全板销售以及维修型号包括:KUKA安全逻辑电路板ESC-C1V1.20/库卡机器人安全逻辑电路板ESC-CIV1.40/库卡机器人备件系列包括:库卡KUKA总线模块库卡KUKA主板:库卡机器人MFC多功能板卡,I/O板,分解数字转换器电路板RDW板。
denso机器人伺服驱动器维修好处理 1、识别错误代码:,需要仔细阅读和理解机器人显示的错误代码。这些代码通常可以提供关于故障原因的线索。 2、检查硬件:根据错误代码,检查可能出现问题的硬件部分。这可能包括电机、传感器、电路板、电源等。检查这些部件是否有明显的损坏或故障。 3、检查软件:如果错误代码指向软件问题,那么可能需要检查机器人的程序或操作系统。这可能包括检查是否有的软件更新,或者是否需要对程序进行修改。 4、重启机器人:有时,简单的重启就可以解决一些临时性的问题。尝试关闭机器人,等待一段时间后再重新启动。 第三步:入仓维修件信息记录,分配给工程师确认故障点,分析维修恢复的可行性,第四步:审核成本后由业务员评估报价,征求用户维修意见,没维修价值主管审批后由业务员退回,第五步:同意维修后客户方回传报价单或合同,不同意维修归档后退回客户(客户只用支付运费,不收取任何检测费)。

维修:如果LED指示灯没亮可能是PSU的200V供电电源没有或PSU上的F1丝毁坏:1如果200V电源没有请检查供电线路--检查及维修控制器部件检查控制器断路器开且没有跳闸维修:合上断路器检查查看电源板(PSU)上的LED指示灯(GREEN)是否亮。此种故障代码存在两种故障情况一种是传输系统的故障,第二种是传输出错。检查故障的方式查看库卡工业机器人动态情况进行判断。库卡工业机器人显示HPU或者RCP故障维修原因:库卡工业机器人出现上述两种故障的主要原因是机器人的KCP出现问题,可以具体分成出现种维修故障时KCP已经损坏,导致的后果是机器人的信号斜坡停止,机器人所有的命令,在这时对此种机器人故障的应急维修措施是将KCP更换新的。第二种是属于传输出错其故障原因则是KCP连接出现错误,出现故障的后果也同样表现为信号斜坡停止及机器人所有命令,对此种机器人维修故障的应急维修措施是排查KCP的连接导线是否连接正常。飞克机器人维修(东莞)有限公司(faykrr)能够高质库卡机器人控制柜维修,库卡机器人示教器维修,库卡机器人I/O板维修,库卡机器人驱动器维修,库卡机器人伺服电机维修,库卡机器人计算机板维修,库卡机器人电源板维修,库卡机器人安全板维修库卡维修案例发那科机器人维修ABB机器人维修安川机器人维修库卡机器人维修川崎机器人维发那科维修案例ABB维修案例安川维修案例库卡维修案例川崎维修案例飞克广东省东莞市松山湖园区中集智谷23栋12楼库卡维修案例库卡机器人驱动器、伺服电机常规维修:2020/12/服务内容:5台库卡机器人驱动器常规维修机器人工作状况确认确认机器人生产工作状况。
使用[空冷]焊枪时,请确认控制面板的焊枪设定为“空冷(LED不亮)。IE-600]显示(闪烁)时一电池电压下降(警告)-此焊接电源为了记忆焊接条件而使用电池。若长不用时,请确认电池残余电量,残余电量过低时,IE-600】显示(闪烁)。此显示只在控制面板未做任何操作(待机)时显示,按任意按键都可解除异常。显示“电池电压下降时不会影响正常操作。若电池没电存储器中记忆的焊接条件或内部功能设定等会消失。另外,电池没电时因无法记忆上次关机前的焊接条件,每次通电(开机)时都须设定所有参数的初期值。关于更换电池的方法请参照12.4项[更换电池]。9TE-710]显示(闪烁)时一缺相检出异常-如果检出一次输入W相缺相。
TgEfOguVtKf