维修网
维修点|维修店
设备维修
松下机器人烧坏维修刹车失灵维修..
免费发布设备维修信息
松下机器人烧坏维修刹车失灵维修保养收藏
更新时间:2024-06-20 01:26:51
编号:8918gecub5a300
分享
收藏
管理
举报
标准价
498.00
元/1
产品名
ABB机器人维修,川崎机器人维修,库卡机器人维修,发那科机器人维修
批发价
起批量
标准价
≥3
388
元/1
2-3
428
元/1
1-2
498
元/1
2年
吴工
13961122002
3228134024
微信在线
获取报价
在线咨询
产品详情
关键词
机器人维修保养
面向地区
江苏
常州
松下机器人烧坏维修刹车失灵维修保养收藏
机器人维修记得联系我们凌肯自动化
它们占地面积小,节省空间,并且可以以多种方式安装,后,工业机器人允许更大的灵活性来适应行业趋势,如果行业需要改变,工业机器人能够以更便宜的方式重建生产线,降低成本,提高准确性和避免产品损坏是包装工业机器人对制造商有利的重要方式。
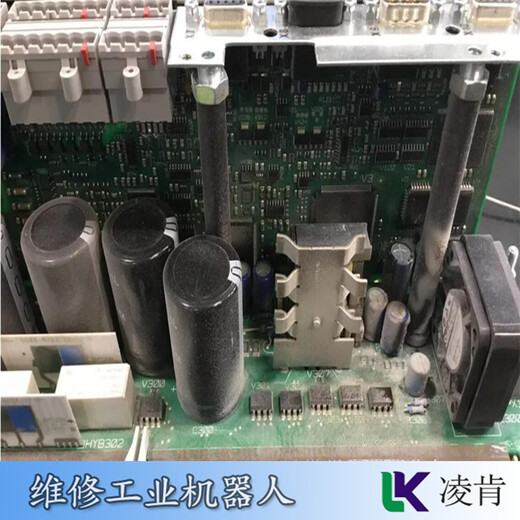
松下机器人烧坏维修刹车失灵维修保养收藏
常州凌肯自动化有限公司是一家自动化设备维修服务型公司,我们可以维修机器人的电路板、控制板卡、主板、驱动板、伺服电机、马达、电机、伺服控制器、伺服控制盒等各个部分,公司拥有业内维修工程师近四十人,实力已遥遥于其他公司。大家可以放心咨询我们。
它可以转弯避开障碍物,但如果出现第二个障碍物,它会再次转弯,当漫游车驶入死胡同或死胡同区域时,这变得特别成问题,漫游者将不断地循环回到自己,直到人类操作员帮助它逃脱,为了解决这个问题,NASA向卡内基梅隆大学寻求自主软件。
自动化市场继续蓬勃发展,使每个人都能将特的人才带到餐桌上,打造完协作团队。协作工业机器人似乎是未来大的回报之一。它们通过减轻艰巨的人工任务为生产线带来的经济效益,同时还使工人能够专注于并为公司带来的、不可分割的个人技能。可以肯定地说,人与机器无缝结合,并肩工作,没有任何障碍或风险,创造了一个更快、更安全、更有效的工作场所。总体而言,协作工业机器人运动意味着人类和工业机器人将能够在没有所有安全防护装置和障碍物的情况下协同工作,这将改善应用程序功能,同时减少工业机器人单元所需的空间量。虽然协作工业机器人是市场上的新事物并迅速普及,但整个自动化行业随着工业机器人变得越来越便宜并且可供各种规模的公司使用。
松下机器人烧坏维修刹车失灵维修保养收藏
机器人运行抖动原因
1、负载问题:末端附带的重量超过标准重量,导致重量不匹配,引起抖动和超速运行。机器人末端安装的夹具过长,太长的末端在机器人移动时会出现抖动,且精度达不到要求。负载材料刚性不够,也是导致抖动的机械问题之一。
2、机械结构问题:齿轮装配有间隙,可能导致机器人运行时的不稳定。减速机等柔性环节的存在,在时极易在末端发生抖动现象。
3、控制参数问题:控制参数没调好,如比例增益过大或微分增益偏小,可能导致抖动现象。电机参数整定问题,电机三环整定的参数问题可能导致电机运行不稳定,进而引起抖动。
4、共振问题:机器人运行中抖动主要是由共振引起的,共振频点可能导致特定频率下的剧烈振动。
5、传感器问题:在算法控制中,传感器数据抖动或发散可能导致算法精度和效果下降,从而引起抖动。
6、驱动器与控制系统问题:驱动控制环路难以通过一套参数适配所有工况,导致负载动态范围大、位置传感器无法直接对负载端进行直接控制,产生末端位置偏差,引起抖动。
7、软件与算法问题:机器人的软件系统或控制算法可能存在缺陷,导致运行时出现抖动。
颜色,大小或重量选择和/或划分物体(),去除毛刺和切割残留物(去毛刺),喷漆各种尺寸的组件和物体,焊接和抛光等活动,用于操纵的工业机器人的优势是显而易见的,即应用的可能性,更多的就业机会,对应的资源优化空间更大。
则第5个按钮将是强制性的安全重置。(5)安全复位-属于所有安全,任何时候违反安全,灯会亮,安全纠正后需要按下按钮,让工业机器人继续运行对于一个Motoman工业机器人系统,也有6个和9个按钮操作站可供选择,以及5个标准按钮,无论单元格。Motoman操作站附带的标准5个按钮是(1)紧急停止、(2)复位、3)保持、4)循环启动和5)伺服开启。后一个按钮是客户特定的或留空。有多种操作员站可供选择,所有这些都使运行工业机器人工作单元就像按下按钮一样简单。FanucAmerica庆祝制造油漆工业机器人35年35年前,FanucAmerica使用来自日本母公司FanucCORPORATION的关键部件生产了台NCPainter。
松下机器人烧坏维修刹车失灵维修保养收藏
机器人运行抖动维修方法
1、检查机器人各部件的螺丝和紧固件,确保它们牢固可靠。如有松动或丢失,及时紧固或更换。
2、检查电机是否过热,如有必要,让机器人在冷却后再启动。检查电机是否过载,如负载过大,尝试减轻负载或调整电机参数。
3、检查齿轮装配是否紧密,如有间隙,进行调整或更换。检查减速机等柔性环节是否有问题,如有问题,进行修复或更换。
4、重新整定控制参数,如比例增益、微分增益等,以优化机器人的运行状态。对电机进行三环整定,确保电机运行稳定。
5、使用滤波器法对共振频点进行陷波滤波,消除陷波引起的相位误差。采用观测器法预估本体末端位置,针对预估的位置做一些参数提前的适配。使用阻尼法提取振动速度信息,同时施加一个反向阻尼,改变振动响应。根据负载情况适配恰当的驱动器参数,实现对振动的有效控制。应用力矩前馈,适配大动态范围的负载变化。进行运动学优化,通过路径规划或速度规划减少共振发生的可能性。
6、检查并更新机器人的软件系统和控制算法,确保它们是的且没有缺陷。如有必要,对软件或算法进行优化,以提高其性能和稳定性。
松下机器人烧坏维修刹车失灵维修保养收藏
从更柔和的喷涂模式中获得了更多的能源节省,使用更少的油漆流量比手工工人所需的更少,这意味着更多的油漆节省和更少的VOC排放,KUKA在操纵比赛中使用youBotKUKA是德国工业机器人行业的,自1800年代以来一直以某种形式出现。
那么RX单元拣选工作单元就是您的佳选择。该工作单元NDC验证,同时还处理各种。“高速验证和无限项目是材料处理的重大突破,”优傲工业机器人公司执行官DidPeters解释道。“这个工作单元是Neocortex极端性能能力的一个例子。它通过使用人工智能具有的随机分箱选择,为客户提供的安全性。”无论您的公司或业务规模大小,RXUnitPickWorkcell相信他们已经创建了一个可以在一年内提供回报的工作单元,这是一个令人难以置信的回报率。如果您还不相信这些惊人的好处,您继续!RXUnitPickWorkcell是一个自动化的工业机器人药房订单履行系统,可以处理数千种特定的预包装。
装配工业机器人也不例外,制造商在尝试缩减流程时需要回答一个主要问题:我们如何削减成本,很简单--合并流程,消除流程和重新调整人力,制造商可以通过将装配自动化集成到他们的设施中来实现这些目标,制造商实现这些目标的一种方法是使用不同的臂端工具。
松下机器人烧坏维修刹车失灵维修保养收藏
也重申了对工业机器人工作替代的恐惧并没有太大的根据。比较了1993年和2007年的生产力和就业情况,几乎没有关于它们的经济影响的系统性经验证据。”因此,这是给你们的工业机器人……他们努力工作并证明自动化确实可以创造新的和持续的就业机会。乘坐KUKA过山车!KUKA简直是在颠覆工业机器人行业,把它翻来覆去!如果您还没有体验过,那么KUKACoaster需要成为您个座位。新一代基于工业机器人的游乐设施向证明,工业机器人背后的KUKA大脑不仅仅是工作,他们还喜欢玩!忘记旧的过山车,轨道向您展示步行动;KUKA过山车,将乘客带入一场充满未知的惊险刺激之旅——每一秒都提供一个新方向,一个令人惊讶的急。
由于工业机器人的可靠性,能力和精度,它们在航天工业中的受欢迎程度越来越高,尽管工业机器人通常与汽车工业相关联或与微型电子元件一起工作,但它们在航天工业中与更大的电子元件工作同样准确成分,航天的产量可能较低。
它将操作员从修剪区域移开,促进安全的工作环境。它安装在单个底板上,专为快速安装和启动而设计。在制造商确定其布线需求后,任何RoboTrim系统都将增加吞吐量并允许制造商选择符合其需求的选项。使用工业机器人提高布线质量当制造商选择自动化布线应用程序时,他的生产力将会提高,精度和准确性也会提高。布线过程从工件上去除材料,无论是出于均匀性还是美学目的。工业机器人布线确保快速的布线过程。布线工业机器人具有灵活的臂端工具,允许工业机器人执行许多材料去除应用程序。开放式龙门概念旨在为布线和其他切割工艺提供多模块选项。这个概念使用安装在龙门配置中的工业机器人来提供佳的可达性。KUKA以其工业机器人布线系统而自豪。
adhh4ady
上一条
人机交互界面维修MCGS触摸屏维修速度快
下一条
HMI人机界面维修海泰克HITECH人机界面维修信誉度高
机器人维修保养相关信息
查看更多信息
MCGS触摸屏触摸响应慢维修黄屏维
41W三菱Mitsubishi触摸屏维修实
6AV6640-0AA00-0AX0西门子触摸屏
威纶WeinviewcMT-HD触摸屏解密周
V812xSFuji富士触摸屏维修值得推
西门子6AV21448GC100AA0触摸屏解
HMI人机界面维修Omron触摸面板维
TPC-1581WP研华ADVANTECH触摸屏
Schneider触摸屏图像抖动维修电
MicroC-more系列光洋KOYO触摸屏
ABB机器人维修热门信息
三菱MitsubishiGT2710-STBA触摸
欧姆龙OMRONNB-S系列触摸屏解密
人机交互界面维修台达人机界面维
欧姆龙OMRONNS12-TS01-V1触摸屏
cMT3105X威纶Weinview触摸屏维修
通用触摸屏主板烧坏维修乱码维修
PLC人机界面维修士林工业触摸屏
GSL-05TL-KPATLITE派特莱触摸屏
KP1200Comfort西门子触摸屏维修
西门子6AV6545-0CC10-0AX0触摸屏
留言板
*
咨询产品
ABB机器人维修
川崎机器人维修
库卡机器人维修
发那科机器人维修
机器人维修保养
咨询主题
价格
商品详情
商品参数
其它
*
咨询详情
*
联系人
*
手机号码
Q Q
号
提交留言即代表同意更多商家联系我
确定
详细资料
主营行业:
设备维修
公司主营:
变频器维修,伺服驱动器维修,工控机维修,触摸屏维修
主营地区:
江苏常州
企业类型:
股份有限公司
公司成立时间:
2022-11-21
经营模式:
生产+贸易型
公司邮编:
213100
小提示:
松下机器人烧坏维修刹车失灵维修保养收藏
描述文字和图片由用户自行上传发布,其真实性、合法性由发布人负责。
常州凌肯自动化科技有限公司
2年
主营:
变频器维修,伺服驱动器维修,工控机维修,触摸屏维修
地址:
力达工业园4楼
—————
认证资质
—————
个人
营业执照
天眼查
手机
微信
常州本地ABB机器人维修热销信息
GT1020-LBL三菱Mitsubishi触摸屏维修满意度高
6AV2123-2MB03-0AX0西门子触摸屏维修周边可上门
DOP-107EG台达Delta触摸屏维修偏远可邮寄
NB7W-TW00B欧姆龙OMRON触摸屏维修周边可上门
cMT2109X2威纶Weinview触摸屏维修一对一咨询
工业显示屏维修京瓷HMI触摸屏维修检修技巧
ATLAS触摸屏触摸响应慢维修触摸响应慢维修详情盘点
人机交互界面维修维控人机界面维修值得推荐
欧姆龙OMRONNT31(C)-EV3触摸屏解密服务态度好
AB触摸屏触摸无反应维修有背光无字符维修现场搞定
TPC-71W研华ADVANTECH触摸屏维修测试准确
NT631C-ST151-EV2欧姆龙OMRON触摸屏维修偏远可邮寄
WOP-1070CK-P40Q1AE研华ADVANTECH触摸屏维修偏远可邮寄
西门子触摸屏屏幕损坏维修无背光维修新篇章
欧姆龙OMRONNT30-ST131-E触摸屏解密来电咨询
© 2024 huangye88.com 京ICP证100626
移动版
极速版
吴工:
13961122002
在线联系:
3228134024
让卖家联系我