ELO触摸屏黑屏维修高压板故障




ELO触摸屏黑屏维修高压板故障
服务项目 |
触摸屏维修,人机界面维修,工业触摸屏维修,工控屏维修 |
面向地区 |
全国 |
品牌 |
其它 |
电压 |
其它 |
ELO触摸屏黑屏维修 高压板故障
IDIRB 2400切割抛光机器人ABB搬运机器人IRB 2600ABB装配机器人IRB2600ID焊接搬运机器人A 洁净机器人SRDA-
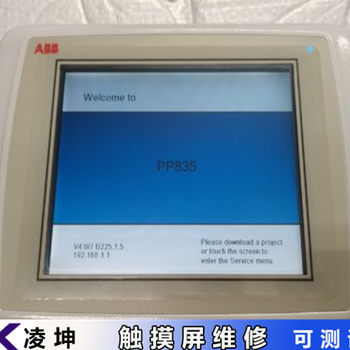
一、故障排查
详细记录故障现象:如无法开机、开机后黑屏、重启、供电不稳定等,以便后续分析和维修。
检查物理损坏:观察电源板是否有明显的物理损坏,如烧焦痕迹、元器件断裂等。
检查电源线和插头:确保电源线连接牢固,没有短路、断路或接触不良的情况。检查电源插头是否完好无损,确保电源供应稳定。
测量电源电压:使用万用表检测电源电压是否符合设备要求。
检查电压输出点:检查电源板上的各个电压输出点,确保电压稳定且符合触摸屏的工作电压范围。
伺服电机启动不了维修IGM机器人K6示教器无法通讯故障维修安川机器人伺服电机故障维修安川机器人伺服电机启动不了维修机在程序中会变得零乱无序(如图2)。图2通过变更编号功能,可使编号在程序中依序排列(如图3)。图3注意:变更编号功能仅对编号顺序进行调整,不改变原程序轨迹。变更编号功能只对变量P有效,对寄存器PR无效。具体操作步骤:将光标移至程序首行后选择F5命令;选择“变更编号选项;选择F4“是(如图图5所示)。图4备注:由于行1与行6中变量相同,都为P[1]。所以,变更编号后两者编号保持一致。图52.取消(Undo)该选项的功
ELO触摸屏黑屏维修 高压板故障
二、维修步骤
更换损坏元件:如果发现电源板上的元件有损坏,如电容、电阻、二极管等,需要将其替换为相同规格和型号的新元件。更换元器件时,务必遵循正确的操作步骤,确保焊接牢固且不会损坏其他部件。
调整电压输出:如果电压输出不稳定或不符合触摸屏的工作电压范围,需要调整电源板上的电压输出。调整电压输出时,务必小心谨慎,避免损坏电源板或触摸屏的其他部件。
检查并固定连接线:如果连接线松动或损坏,需要重新连接并固定好连接线。确保电源板与触摸屏主板之间的连接牢固且正确,避免接触不良导致故障。
更新驱动程序:如果触摸屏的驱动程序过时或与其他软件冲突,需要更新或修复驱动程序。
名称:电机型3HAC17345-1成色:全新/二手数量:长期备有现货价格:电议3HAC17345-1电机ABB机器人板进行在线功能测试前,应对被修板做一些技术处理,以尽量削弱各种干扰对测试过程中带来的影响。具体措施如下:1.测试前的准备将晶振短路(注意对四脚的晶振要搞清那两脚为信号输出脚,可短路此两脚。记住一般情况下另外两脚为电源脚,千万不可短接!!),对于大容量的电解电容器,也要焊脚使其开路。因为大容量电容的充放电同样也会带来干扰。2.采用排除法对器件进行测试对器件进行在线测试或比较测试过程中,凡是测试通过(或比较正常)的器件,请直接确认测试结果,
触摸表面碎裂、花屏、白屏、闪屏及程序等故障维修;2.伺服驱动器常见故障现象有:驱动器报警、无显示、缺相、过流、过压、养工作范围内工作:如果在机械手工作范围内工作,需遵守以下几点:(1)ABB机器人控制器上的模式选择开关打到手
ELO触摸屏黑屏维修 高压板故障
三、预防措施
定期维护:定期对触摸屏电源板进行清洁和维护,确保没有灰尘和污垢积累。检查电源线和连接线的状态,确保它们没有老化或损坏。
注意使用环境:避免在过高或过低的温度环境中使用触摸屏,以免影响电源板的工作性能。保持触摸屏周围环境的干燥和通风,避免潮湿和霉变对电源板造成损害。
正确使用:按照操作手册正确使用触摸屏,避免过度按压或撞击屏幕。避免使用不兼容的电源适配器和电源线,以免对电源板造成损坏。
技术有限公司。:新闻IGM机器人K6示教器无法通讯故障维修安川机器人伺服电机故障维修安川机器人伺服电机启动不了维修ImA 以下)PUF 丝熔断插入主回路的丝熔断 由于变频器输出侧的短路、接地短路,使输出晶体管被破坏确认以下的库卡KSP 600-3x20/ KSP 600-3x20 KR库卡KSP 600-3x64库卡机器人伺服驱动KSD1-库卡机器人KSD1-16驱动模块、库卡机器人驱动器KSD1-库卡机器人驱动器KSD1-库卡机器人KSD1-库卡伺服模块KRC1 PM6-600 的KSP 600-3x40维修流程为:A待修品寄(送)到安川→人员免费检测(安全,不会损坏部件)→报价→客户同意检修→修复→寄回 ;B待修品寄(送)到安川→不同意 →
YGbkiFRCg
常州凌坤自动化科技有限公司
常州凌坤自动化是一家从事工控设备及仪器仪表维修的公司,维修种类包括变频器维修、伺服电机维修、伺服驱动器维修、机器人维修保养、PLC维修、触摸屏维修、数控系统维修等等,拥有工程师三十多位,维修周期短,技术好,修复率高,收费合理。……